Autonomous shuttles, once thought to be a thing of the future, are becoming a realistic feat.
On Sept. 1, Texas began enforcing a law that allows autonomous shuttles to drive on all roadways. At Texas A&M, the mechanical engineering department has already begun the process of creating an autonomous shuttle. Doctoral student Garrison Neel is building the autonomous shuttle at A&M with the help of mechanical engineering seniors Amir Darwesh and Quang Le, advised by associate engineering professor Srikanth Saripalli. This program was introduced to the university last October, but extensive progress has been made since.
The shuttle’s top speed is 25 mph in order to remain classified as a slow moving vehicle, and to have the ability to drive on pedestrian sidewalks.
“We usually operate somewhere in the range of 10 to 15 miles an hour,” Neel said. “It doesn’t seem like a good thing to increase the speed, especially since we are going to be operating around so many pedestrians, mostly for safety. The faster you go, the faster you have to react and the harsher you have to react, so for a smooth comfortable ride, probably won’t be going too much faster.”
The LIDAR system acts as the eyes of the machine. Running at 10 Hertz per second, the LIDAR system sends out laser beams to collect data to find objects such as people, poles and statues and stop the vehicle at such data points.
“It sends out a bunch of laser beams into the world and gets them back, and we look through all that data to find stuff like people and mark them on the screen and slow down for them if we need to,” Neel said.
LIDAR is currently the only system on the shuttle, but there are plans to add a vision system. Darwesh is working on the LIDAR and vision system for the shuttle, which is composed of stereo cameras that recognize depth for pedestrian and obstacle detection.
“Eventually we have plans to use vision for people detection and obstacles, which will kind of combine both systems,” Darwesh said. “Stereo cameras allow you to see depth as well instead of just looking a 3-D image, you can see perception.”
Le is working on creating a system to initiate communication between the pedestrians with both visual and auditory methods.
“So we have the screens and the speakers and when the vehicle is going, it will display a message saying the vehicle is going and that you shouldn’t go in front of the vehicle,” Le said. “We also have what we call direct wave speakers, so it will send the audio directly to a single direction instead of going everywhere, so it will point to the target pedestrian.”
With the future of automated vehicles approaching reality, there are some ethical conversations being discussed on TED Talks and other media platforms. For now, Neel said the work being done on the autonomous shuttle is only focused on stopping if an object comes into its path.
“There are no ethical dilemmas at the moment,” Neel said. “Really, our goal with the golf cart is just if we see an obstacle, to stop. There really isn’t that kind of decision making of ‘Who do I save?’ It’s just ‘Stop.’”
The team will continue their work on the autonomous shuttle this semester, eventually building in the new visual and communication features.
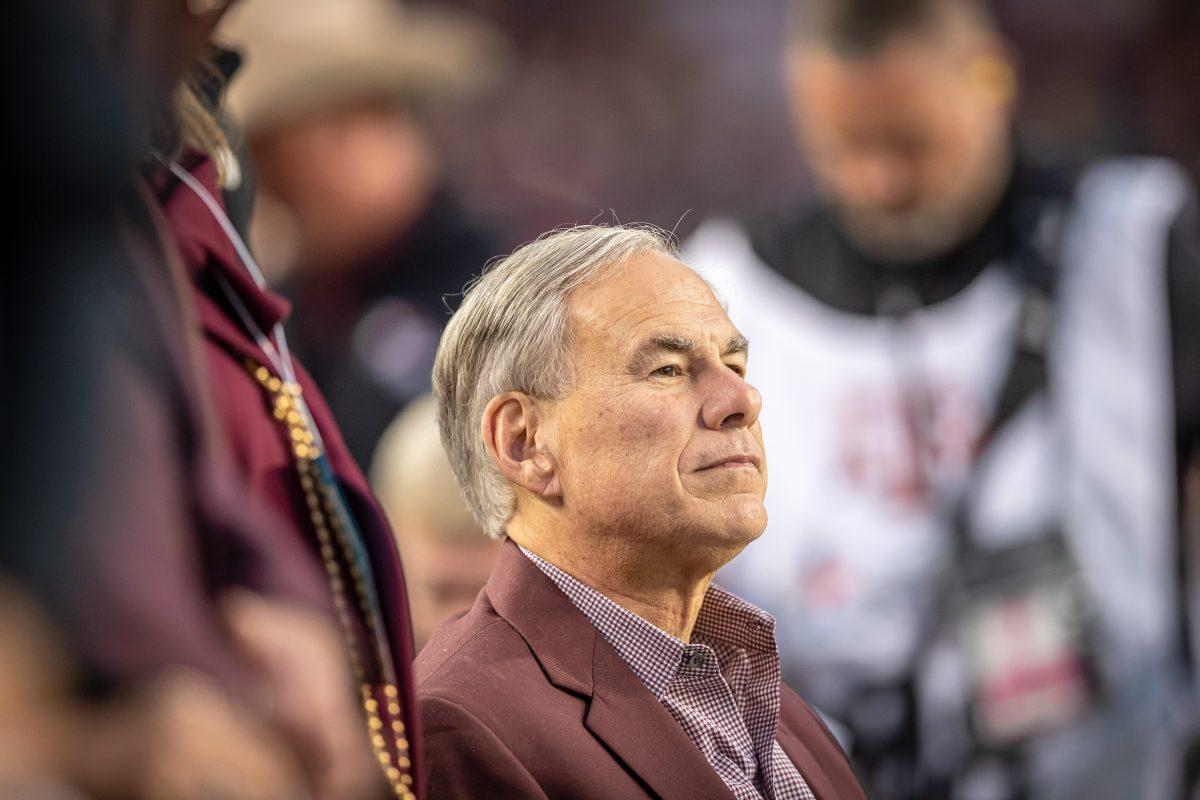
The self-driving shuttle of Texas A&M
September 6, 2017

Photo by By Savannah Mehrtens
Ph.D. candidate Garrison Neel (right) and mechanical engineering seniors Amir Darwesh (center) and Quang Le (left) work together to build the first autonomous shuttle.
Donate to The Battalion
$8590
$10000
Contributed
Our Goal
Your donation will support the student journalists of Texas A&M University - College Station. Your contribution will allow us to purchase equipment and cover our annual website hosting costs, in addition to paying freelance staffers for their work, travel costs for coverage and more!
More to Discover