Connor Paetzold, SciTech reporter, sits down with Aaron Ames, mechanical engineering professor and head of the A&M Bipedal Experimental Robotics Lab, to discuss his work with robots that mimic human movement and prosthetic legs.
THE BATTALION: Why did you get into robotics; what interested you about it?
AMES: It’s just cool. Take locomotion — it’s a simple thing we do all the time, but that simplicity shrouds an immense amount of complexity. So if we can understand this really complex problem and then realize this really simple, fluid behavior, there’s a beauty to that. That simplicity on the far side of all that complexity is what has always appealed to me, there’s a concrete answer that is beautiful if you’re smart enough to figure it out.
THE BATTALION: What is AMBER Lab currently working on?
AMES: AMBER 3 is our current bipedal robot, it was built from scratch here at A&M. AMBER 3 is the third robot in the AMBER series. Every time we make it better, bigger, faster, stronger and we’re currently able to test really advanced control methodologies. We also have AMPRO, a custom prosthetic device that is powered which means it has actuators at the knee and ankle. It has onboard processing and power so it is self-contained.
THE BATTALION: Besides prosthetics, how is bipedal walking more useful than other forms of robotic movement such as wheels or four legs?
AMES: Think of a disaster scenario — there’s an earthquake and there’s rubble everywhere and wheeled robots just cannot navigate this uneven terrain. So the idea is to improve mobility in these unstructured environments. Four legs in some senses is easier but environments we interact with on a daily basis are really built for two-legged locomotion. Tight hallways that turn, catwalks, narrow staircases, all those things were built for humans so humanoid robots would best be able to navigate those environments.
THE BATTALION: How is AMBER 3 more advanced than AMBER 2?
AMES: AMBER 2 was great, it was able to demonstrate human-like locomotion specifically things like heel-toe behaviors. When we walk we roll our feet, our heel strikes and then we roll onto our toe and then push off, most bipedal robots today don’t demonstrate that behavior. AMBER 3 we designed full-sized and it’s much more powerful. So that gives us a lot more power to demonstrate more advanced behaviors.
THE BATTALION: Could someone wearing AMPRO do more than walk, for example run or ride a bike?
AMES: Oh yeah, all those things. The advantage to the algorithms we have is that we have an automatic way of generating these behaviors on the device. You take the person and you have them do the behavior and you synthesize that behavior on the device. We’ve done well so far walking up and down slopes, on treadmills and stairclimbing. So yes it’s certainly possible and we’re expanding this behavior library as we speak.
THE BATTALION: What does the future hold for AMBER lab? What are the next steps for your current projects and what new projects would you like to take on?
AMES: With AMBER 3 we just finished building it and we want to realize some really cool behaviors with it, I actually challenged my students to try and make the robot do a back flip. With AMPRO we’ve designed AMPRO 2 now and we’re going to start building it very soon, it’s going to be lighter and more efficient. And then in terms of new projects we’ve already got prosthetic devices so up next is exoskeletons. I’m interested in exoskeletons that work in minimal ways. So if someone has an injury on their ankle they can have a small device they could wear all the time that would just give them that little extra edge.
Q&A: Aggie-built robots mimic human movement
February 5, 2015
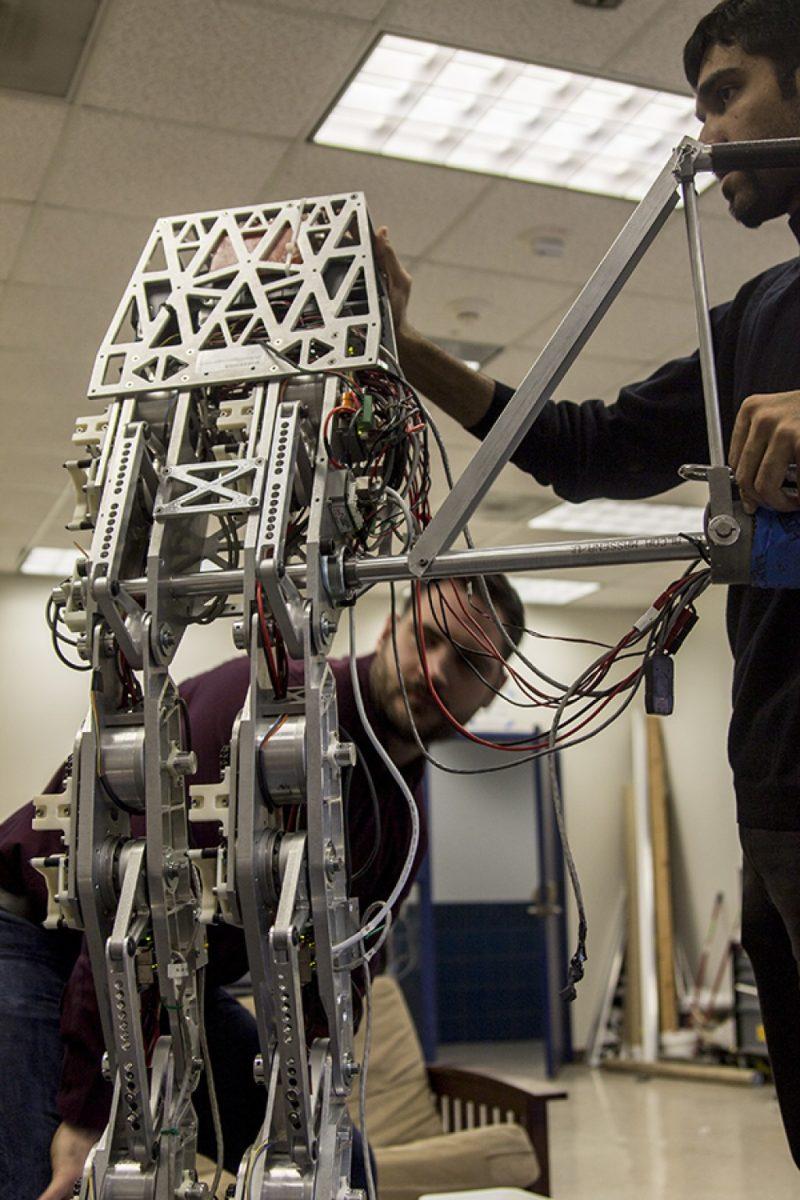
Photo by Shelby Knowles
AMBER 3 was designed by professor Aaron Ames (left) at A&M to mimic human movement.
Donate to The Battalion
Your donation will support the student journalists of Texas A&M University - College Station. Your contribution will allow us to purchase equipment and cover our annual website hosting costs.
More to Discover