Sequestered in the basement of the Bright Building behind a looming vault door lies a place where math, science and nature culminate to take flight.
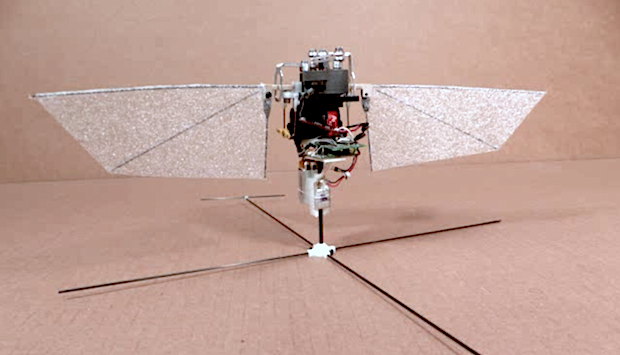
A duo comprised of aerospace assistant professor Moble Benedict and graduate student David Coleman is spearheading a project to create a robotic replica of a hummingbird. The two are aiming to design a device that behaves mathematically similar to a hummingbird as well invent a more naturally designed drone apparatus.
Benedict’s inspiration for the project arose when faced with the issue of taking large scale aircraft and scaling them down to smaller hand or computer controlled sizes.
“One issue is that when you take the micro air vehicles (MAV) and scale them down they lose a large amount of efficiency,” Benedict said. “But then you look at nature and see insects and bugs flying for extended periods of time.”
Benedict said he was perplexed by designing an MAV that could fly in turbulent settings. Most current models are not equipped to handle cross-winds or gusts according the professor.
“If you buy a hobby helicopter it flies beautifully inside, but the moment you take it outside the slightest gust of the wind could completely throw it off,” Benedict said. “But then if you take a look in nature a hummingbird, which weighs 3 grams — flies perfectly.”
Even when it came to the controls and autopilot processing, efficiency and size were of utmost importance according to Vikram Hrishikeshavan, assistant research student at the University of Maryland who was instrumental in the autopilot development.
“The IMU (inertial measurement unit) had to be as small as possible,” Hrishikeshavan said. “The processing board itself is smaller than a postage stamp.”
The goal is to create a more efficient, agile and robust MAV, which requires quite a bit of hefty mathematical calculations.
“We have observed mathematical flight calculations and models of hummingbirds in nature,” Coleman said. “Our goal is to create a vehicle that, when measured, recreates those observed calculations and models.”
In an effort to plan proactively for future implementation more precise modeling and calculations, wing design became one of the biggest steps in developing the MAV. Coleman said the need to design a MAV without excessive rudders or stabilizers will be important to the operation of the hummingbird.
“If you look closely at a hummingbird in flight you can see how independently each wing moves from the other,” Coleman said. “All of its control and stabilization is done by changing the specific motion of its wings.”
Moving forward, Benedict and Coleman hope to improve the endurance for longer flight and make it fully autonomous in order to fly independently of controls. This fits along with the ultimate goal of creating a MAV with military, ecological and civilian applications.